Explore
Make
Reveal


Conseil en réalité augmentée, réalité virtuelle et intelligence artificielle
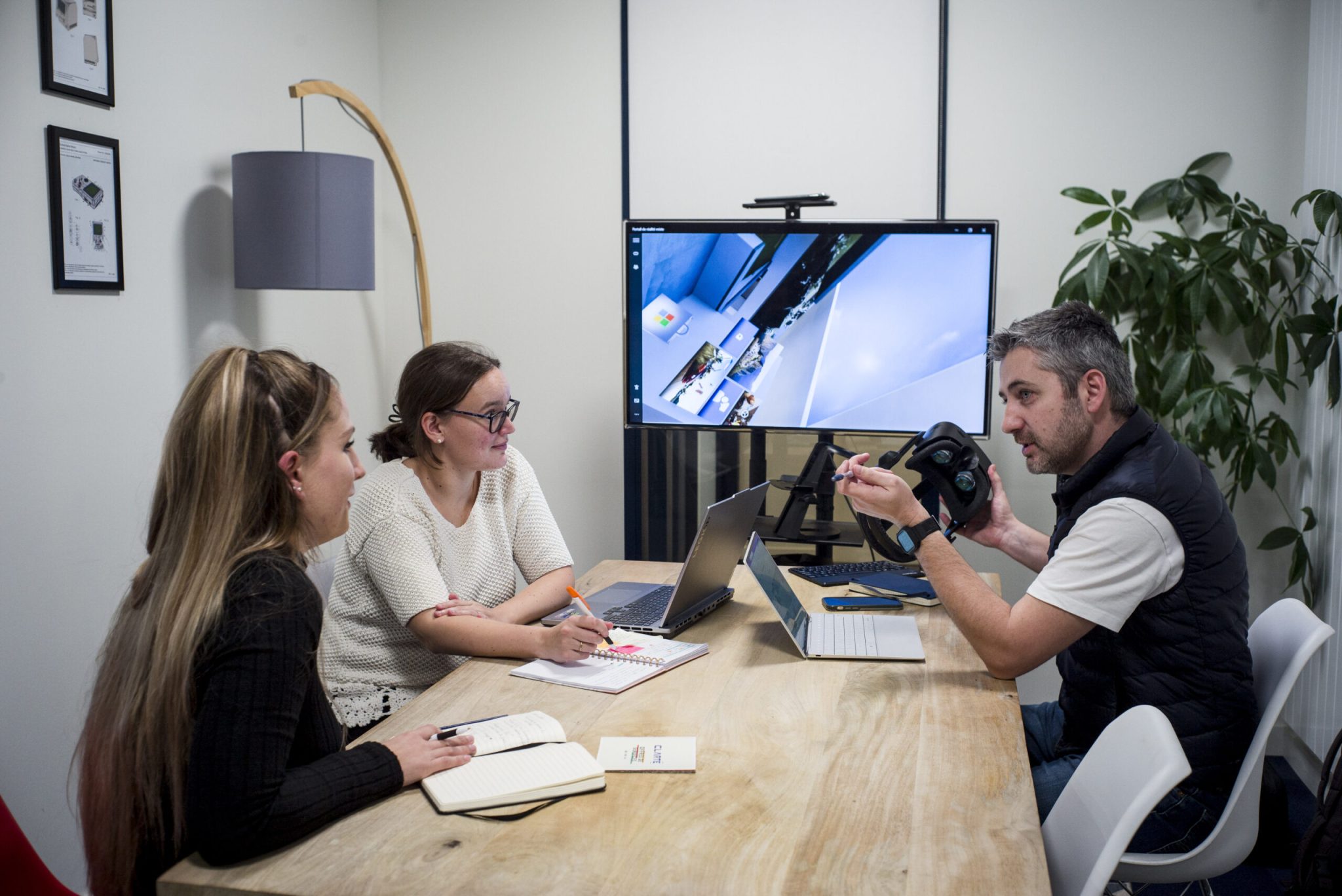
Clarté, accélérateur d’innovations immersives
Depuis plus de 25 ans nous sommes l’acteur de référence dans le domaine de la réalité virtuelle et augmentée pour les usages professionnels. Nous sommes à la fois explorateurs, créateurs et passeurs. Nous aidons nos clients à accroître leur performance au travers de missions de conseil et de développement de solutions en lien avec les technologies immersives et d’assistance cognitive.
Ils nous font confiance
Des services pour les professionnels
Nous vous accompagnons dans l'intégration de la VR/AR dans votre entreprise
Vous avez une idée de projet ou des besoins spécifiques au sein de votre entreprise ? Nous sommes là pour vous guider et élaborer la solution optimale en accord avec vos objectifs. Que ce soit la rédaction d’un cahier des charges, la réalisation d’études comparatives de solutions ou encore le développement de A à Z de votre projet : nos experts prendront en charge ces missions pour vous offrir un accompagnement sur mesure.

On réalise vos projets VR/AR
Nous sommes les pionniers du développement en réalité virtuelle, augmentée et intelligence artificielle. Avec notre équipe d’ingénieurs et docteurs spécialisés, nous concevons des solutions avant-gardistes pour repousser les limites technologiques et répondre aux besoins de nos clients. Notre approche axée sur l’innovation nous permet de créer des expériences uniques. Une fois la solution développée, nous assurons un transfert de technologie.

Gratuit
Découvrez les technologies immersives
Bénéficiez d’un échange gratuit et personnalisé avec l’un de nos conseillers technologiques pour découvrir le potentiel de la réalité virtuelle, augmentée et mixte. Lors d’un rendez-vous dans vos locaux, à distance, au SPi du numérique à Saint-Nazaire ou au Laval Virtual Center, un conseiller vous présente les dernières technologies et leurs usages, tout en discutant de vos besoins et des solutions possibles applicables à votre secteur.

Gratuit
Découvrez et testez avec vos équipes
Dans notre showroom de démonstrations (Holodeck), venez tester les technologies de réalité augmentée et virtuelle. Découvrez des cas d’usages concrets et les bénéfices dans votre secteur d’activité grâce à plus de 25 démonstrations disponibles. Nous disposons des derniers équipements du marché.

Utilisez la VR/AR dans votre entreprise
Découvrez les avantages de la VR/AR avec notre service de location de valises adaptées aux PME. Livraison rapide à vos bureaux, formation personnalisée et test sur 1 mois pour des bénéfices immédiats. Explorez 4 usages en PME : revue de conception, visualisation, assistance au poste de travail et expertise à distance.

Formez-vous à la RV/RA
Plongez dans l’univers passionnant des outils de création et de développement d’applications personnalisées de réalité virtuelle et augmentée. Nos formations sont adaptées aux entrepreneurs, développeurs web et infographistes. Des sessions de 2 à 4 jours offrent un équilibre entre théorie et pratique, avec accès à des équipements adaptés. Notre organisme est certifié Qualiopi.
VR
Réalité virtuelle
Créer une grande variété d’environnements
La réalité virtuelle est une technologie qui plonge les utilisateurs dans des environnements numériques interactifs (3D), recréant des scénarios et des situations de manière immersive. Dans l’industrie, la VR est utilisée pour créer des simulations et des environnements de formation virtuels, pour la conception de produits, la visualisation de données complexes et bien plus encore.
AR
Réalité augmentée / mixte
Résoudre les problèmes en temps réel
La réalité augmentée ou mixte permet d’intégrer des éléments numériques dans le monde réel. Les entreprises peuvent ainsi créer des applications pour permettre aux clients de visualiser des produits en 3D dans leur environnement avant l’achat, améliorer la formation en superposant des instructions virtuelles à l’équipement réel, aider les techniciens à effectuer des réparations, etc. Les exemples sont nombreux.
AI
Intelligence artificielle
Aider l’humain dans son quotidien
L’intelligence artificielle est un domaine technologique très large. Chez Clarté, nous nous intéressons à développer des usages qui permettent aux IA de comprendre visuellement l’environnement autour de l’opérateur et de converser avec lui afin « d’augmenter » ses capacités cognitives. Ces IA peuvent également concrétiser de nouvelles formes d’interactions avec les machines et détecter des risques en situation de travail.

Les bénéfices des technologies immersives






Bénéficiez d’un accompagnement adapté à vos besoins
Quelle que soit la taille de votre entreprise, sécurisez votre projet innovant avec un accompagnement personnalisé. De la découverte à la mise en œuvre, nos conseillers technologiques sont là pour vous guider à chaque étape de votre projet. Profitez d’une expertise reconnue et sur mesure pour assurer le succès de votre entreprise.
En 25 ans, plus de 400 missions
Responsable bureau d’études
Clarté nous a fait découvrir les avantages de la réalité virtuelle pour la revue collaborative, permettant d’offrir à nos clients une expérience immersive et collaborative, tout en optimisant nos process de conception (réduction des temps de conception et des erreurs).

Chef de service
Grâce à Clarté, nous disposons désormais d’une solution qui forme nos apprenants en VR. L’application offre une expérience réaliste et sécurisée. La détection de la respiration et les scénarios adaptatifs nous permettent d’optimiser les compétences techniques des plongeurs. Un vrai atout pour la sécurité sous-marine !
Chef de projets
La solution VR de Clarté a révolutionné la formation des médecins légistes. Des scénarios de scène de crimes réalistes, une simulation biomécanique précise, et des environnements 3D authentiques ont comblé le fossé entre théorie et pratique. Cette approche innovante minimise les risques d’erreurs sur le terrain. Une révolution dans l’apprentissage médical grâce à la VR !
L’équipe R&D
Dans notre journée d’innovation, la session chez Clarté sur la VR/AR a été un temps précieux. Présentation des technologies, démonstration d’applications, et même immersion personnalisée avec notre pompe en 3D. Un moment constructif et convivial pour toute l’équipe !
Responsable de la R&D
En tant que responsable R&D, j’ai sollicité Clarté pour sensibiliser mon équipe et ma direction à la VR/AR. Après une session immersive, nous avons créé un groupe de travail pour explorer des projets applicables à nos métiers. Merci, Clarté !